AI, DataScience
Neural Network-Based Self-Tuning PID Control for Underwater Vehicles
이무기뱀술
2022. 2. 22. 10:00
728x90
논문 리뷰
이 포스트의 모든 저작권은 원작자에게 있습니다.
Sensors 2016
by Rodrigo Hernández-Alvarado 1,*,†,‡,Luis Govinda García-Valdovinos 1,‡,Tomás Salgado-Jiménez 1,‡,Alfonso Gómez-Espinosa 2,‡ORCID and Fernando Fonseca-Navarro 1,‡
subject:
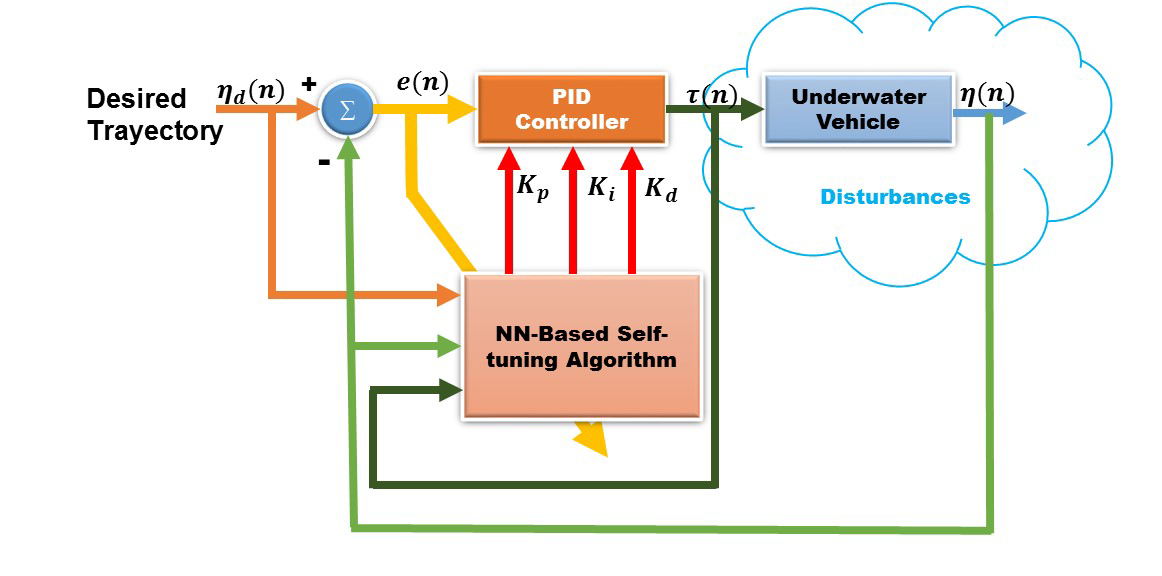
Comparison between Conventional PID-like controller and Auto-tune PID-like controller based on Neural Networks (NN)
keyword:
neural networks
auto-tuning PID
ROV(Remotely Operated Vehicles) control
disturbances
result:
Auto-tune PID-like controller based on Neural Networks attained the best performance with less energy.
background knowledge:
Neural Network
PID
Model

parameter
- u(n), u(n-1)
- reference inputs
- desired trajectory
- y(n), y(n-1)
- reference outputs
- real trajectory
- C(n), C(n-1)
- control signals
- wji
- weights of the hidden layer
- vji
- weights of the output layer.
728x90