CV, AR, VR
solvePnP : solve Perspective-n-Point를 ChatGPT에 물어보았다.
이무기뱀술
2023. 3. 24. 20:32
728x90
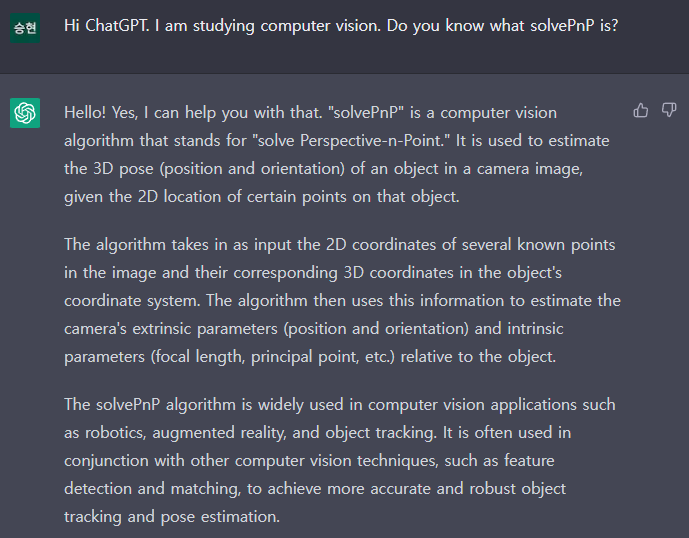
안녕하세요! 네, 제가 도와드릴 수 있습니다. "solvePnP"는 컴퓨터 비전 알고리즘으로, "원근법-n점 풀기"의 약자입니다. 이 알고리즘은 카메라 이미지에서 물체의 특정 지점의 2D 위치가 주어지면 물체의 3D 포즈(위치 및 방향)를 추정하는 데 사용됩니다.
이 알고리즘은 이미지에서 알려진 여러 점의 2D 좌표와 물체의 좌표계에서 해당 3D 좌표를 입력으로 받습니다. 그런 다음 알고리즘은 이 정보를 사용하여 물체를 기준으로 카메라의 외생 파라미터(위치 및 방향)와 내생 파라미터(초점 거리, 주점 등)를 추정합니다.
solvePnP 알고리즘은 로봇 공학, 증강 현실 및 객체 추적과 같은 컴퓨터 비전 애플리케이션에서 널리 사용됩니다. 특징 감지 및 매칭과 같은 다른 컴퓨터 비전 기술과 함께 사용하여 보다 정확하고 강력한 객체 추적 및 포즈 추정을 달성하는 경우가 많습니다.
solvePnP가 무엇인지 정확하게 파악하고, 사용하는 목적과, 분야를 잘 설명하였다.

solvePnP와 SLAM은 모두 컴퓨터 비전 및 3D 포즈 추정과 관련이 있지만, 목적과 접근 방식이 다릅니다.
solvePnP는 카메라 이미지에서 물체의 특정 지점의 2D 위치가 주어질 때 물체의 3D 포즈를 추정하는 문제를 해결하기 위한 특정 알고리즘입니다. 이 알고리즘은 카메라의 내재적 및 외재적 매개변수를 알고 있다고 가정하고 카메라 좌표계에서 물체의 포즈를 해결합니다.
반면에 SLAM(동시 측위 및 매핑)은 로봇 공학 및 컴퓨터 비전의 보다 광범위한 문제로, 미지의 환경에서 로봇이나 카메라의 3D 포즈를 추정하는 동시에 해당 환경의 맵을 구축하는 것을 포함합니다. SLAM은 일반적으로 카메라, 라이더, IMU와 같은 다양한 센서의 정보를 통합하고 데이터를 융합하여 로봇/카메라의 포즈를 추정하고 동시에 환경 지도를 구축하는 작업을 포함합니다.
SLAM의 목표는 단순히 단일 이미지에서 물체의 자세를 추정하는 것이 아니라 시간이 지남에 따라 로봇/카메라의 자세를 지속적으로 추적하고 새로운 데이터가 들어올 때마다 환경 맵을 업데이트하는 것입니다. SLAM은 solvePnP보다 더 어렵고 계산적으로 까다로운 문제이며, 특징 감지 및 매칭, 시각적 주행 거리 측정, 번들 조정, 루프 폐쇄 감지 등의 고급 기술이 필요합니다.
따라서 solvePnP와 SLAM은 모두 3D 포즈 추정을 다루지만 목표, 범위, 복잡성에서 차이가 있습니다.
자율 주행에 쓰이는 SLAM과 비교하여 설명하라고 했더니, 잘 설명한다.

물론입니다! 다음은 solvePnP에 대해 자세히 알아볼 수 있는 몇 가지 리소스입니다:
OpenCV 문서: OpenCV는 solvePnP 알고리즘의 구현이 포함된 인기 있는 컴퓨터 비전 라이브러리입니다. 이 문서에서는 알고리즘, 입력 및 출력에 대한 자세한 설명과 Python 및 C++에서 알고리즘을 사용하는 방법에 대한 몇 가지 예제를 제공합니다. 문서는 여기에서 찾을 수 있습니다: https://docs.opencv.org/3.4/d9/d0c/group__calib3d.html#ga549c2075fac14829ff4a58bc931c033d
"컴퓨터 비전의 다중 뷰 지오메트리"(Richard Hartley, Andrew Zisserman 저): 3D 지오메트리, 카메라 모델, 특징 감지 및 매칭, 카메라 보정 등 광범위한 주제를 다루는 컴퓨터 비전에 관한 고전적인 교과서입니다. 이 책의 6장에서는 포즈 추정에 대해 다루고 있으며, solvePnP 알고리즘과 그 변형에 대한 자세한 설명이 포함되어 있습니다. 이 책은 Amazon이나 다른 온라인 서점에서 찾을 수 있습니다.
"3D 컴퓨터 비전: OpenGL을 사용한 수학적 입문"(Daniel Herrera C., Emanuele Frontoni, Laura Palma 저): 3D 비전과 OpenGL 프로그래밍에 중점을 둔 컴퓨터 비전 관련 교과서입니다. 이 책의 8장에서는 카메라 보정 및 포즈 추정을 다루며, solvePnP 알고리즘과 OpenGL에서의 구현에 대한 단계별 설명이 포함되어 있습니다. 이 책은 아마존이나 다른 온라인 서점에서 찾을 수 있습니다.
Coursera의 "카메라 보정 및 3D 재구성" 강좌: 토론토 대학교에서 제공하는 무료 온라인 강좌로 카메라 보정, 3D 재구성 및 포즈 추정의 기초를 다룹니다. 이 과정의 2주차에서는 solvePnP 알고리즘과 그 변형을 다루며, Python 및 MATLAB을 사용한 대화형 프로그래밍 연습이 포함되어 있습니다. 이 과정은 여기에서 등록할 수 있습니다: https://www.coursera.org/learn/camera-calibration-3d-reconstruction
이 리소스가 학습 여정에 도움이 되길 바랍니다!
그동안 ChatGPT는 그럴듯하게 지어낸 말을 많이 하여, 전혀 기대하지 않은 질문인데, 의외로 훌륭한 답변을 하였다.
1. OpenCV docs
2. Multiple View Geometry in Computer Vision

근본 넘치는 책이다 ㅇㅈ한다.
3. 이건 뭔지 모르겠다 같은 제목의 책이 있기는 한데, 저자도 다르고, 설명한 챕터도 없다.

저자로 소개된 한 분은 CV 연구하시는 분인 것 같은데


2분은 누구세여?
4. Coursera 강의. 존재하지 않는다
728x90